Shape-Preserving Techniques with Fractional Order C1 Linear Trigonometric Spline
Syed Khawar Nadeem Kirmani*, Raja Noshad Jamil, and Muhammad Awais
University of Management and Technology, Lahore, Pakistan

Abstract
Generating a smooth curve or surface is the prime goal of interpolation. If the given interplant reflects the exact shape of the data, it would be an added advantage. In this study, a general form of Fractional Order Linear Trigonometric Spline (FOLTS) is proposed with C^1 continuity. A method for modeling imperative curves has been developed with the goal of using it in a variety of engineering, scientific, and design fields. The primary goal of this research is to combine linear trigonometric spline with Caputo derivative in order to obtain better control over the curve in each sub-interval. The curve can be manipulated locally with the help of one degree of freedom involved in the form of fractional parameters. To describe shape-preserving interpolation applications, two more parameters namely “s” and “t” have been developed. These parameters ensure that the interpolated piecewise curve is able to satisfy shape-preserving properties. The study also compares FOLTS with quadratic Lagrange and cubic spline
1. Introduction
Preserving the shape of a given set of points using cubic or trigonometric spline is a significant means to display data as curves and surfaces. Shape preservation entails maintaining the fundamental geometrical characteristics of the data, such as positivity, convexity, and monotonocity. In this research, a method for modelling imperative curves has been developed with the goal of using it in a variety of engineering, scientific, and design fields. It uses piecewise linear trigonometric functions and comprises a novel spline approach. Additionally, the suggested curve model has the most advantageous geometric characteristics. Smooth and eye-catching curves are formed by a number of spline functions. Hence, a trigonometric interpolating curve approach for positive and controlled data is presented in this study. For this purpose, four positive shape parameters used for controlling the shape are being inculcated. Both evenly spaced and unequally spaced data can be used in this method. The benefit of this method is that the interpolating curve may be computed locally, making it possible to locally modify the spline curve. A powerful numerical method based on trigonometric spline functions is also included with the aid of fractional order derivative to find the approximate solutions of the tabulated data points.
It is of little consequence that nonlinear and common integer order derivative mathematical models usually perform poorly. Barsky [1] developed the fundamental aspects related to B-spline basis function in the shape of Beta Spline at various knots. The results showed greater flexibility in curves. Hussain et al. [2] developed positive, monotone, and forced data processing algorithms to display scientific information using rational cubic interpolation. Trigonometric function with shape parameters was introduced by Ibraheem et al. [3] to illustrate the presence of positivity pertinent to the positive curve and surface tabulated data knots. Zhu et al. [4]created quadratic trigonometric interpolation spline curves. Liu et al. [5] studied the shape-parameterized trigonometric polynomial B-spline curves and surfaces. A vital contribution in computer aided geometric design was provided by Sarfraz et al. [6]. They introduced various spline methods for shape modeling. Spline approaches have emerged as one of the primary tools for addressing the bulk of issues related to the path of functions including interpolation issues [7].
Fractional calculus has become increasingly significant in recent years in a number of disciplines including signal and image processing, control theory, chemistry, and mechanics. Caputo form of fractional order derivative remains a relatively new and an easy to use approach which is being adopted by various scientists in different areas of interest. FDEs have attracted significant attention because of their ability to model composite phenomena, such as visco-elastic materials [8], economics [9], and continuum and statistical mechanics [10].Caputo fractional order derivative with linear trigonometric spline function has been applied to monotone increasing or decreasing data with better accuracy [11]. Singh et al. [12] suggested that the easiest way to model physical and engineering processes using fractional calculus is by utilizing fractional differential equations. Kirman et al. [13, 14] addressed this issue with the use of cubic and bi-quadratic Caputo fractional order spline. Samreen et al. [15] examined shape-preserving curve interpolation for positive, monotonic, and convex data above a line. Theyused a piecewise rational cubic function with four form parameters.
Trigonometric splines have been utilized by certain authors to characterize curves and surfaces for shape-preservation [15]. Samreen et al. [16] provided a competent method to calculate the Bézier points of a generalized cubic β-spline curve and demonstrated how multiple knot insertion is related. Additionally, they identified the vertices of a composite Bézier spline curve.
The current paper presents the general form of fractional order trigonometric spline. It also contains the development of the most recent spline with Caputo derivative, with four free parameters, derivative estimation, and geometric interpolation qualities in each sub-interval. The figures include a shape control analysis. This study also discusses shape-preserving interpolation applications which take limited data modeling and positivity preservation into account. The automated choice of two parameters ensures the shape-preserving properties. It also compares quadratic Lagrange and cubic spline accompanied with graphical results. Further, a recursive algorithm for creating a string of fraction spline curves is also provided.
2. FRACTIONAL ORDER TRIGONOMETRIC SPLINE
In this section, the C1 trigonometric polynomial with shape parameters is developed. The trigonometric spline (T-spline), defined for μ∊ [μi, μ(i+1)], μiμ(i+1), ⩝i = 0, 1, ….. n-1, with unknown constants ai,b(i),ci,di is described by the equations given below.
Pi (μ)=ai+bi (μ-μi)+ci sin(μ-μi)+cosk(μ-μi) , for μ∊ [μi,μ(i+1) 1)
P(i+1) (μ)=a(i+1)+b(i+1) (μ-μ(i+1) )+c(i+1) sink(μ-μ(i+1) )+d(i+1) cosk(μ-μ(i+1)), for μ∊ [μ(i+1),μ(i+2)] (2)
These two polynomials join three points, namely (μi,yi), (μ(i+1),y(i+1)), and (μ(i+2),y(i+2)) with the following properties,
(Pi (μi )= yi, Pi (μ(i+1) )=y(i+2),@ Pi (μ(i+1) )= P(i+1) (μ(i+1) ), P(i+1) (μ(i+1) )=y(i+1),Piα (μ(i+1) )=-P(i+1)α (μ(i+1)), Pi (μ(i+1) )=P(i+1)(μ(i+1)).) (3)
Where "α" is a derivative of fractional order, such that 0 < α < 1.a
In order to find the fractional order derivatives, the following equations are used.
Left-fractional Left-fractional=1/(τ(1-αl)) ∫
Right-fractional=-1/(τ(1-αl))∫_(μ(i+1))s(P(i+1)(μ))/((τ-μ(i+1))^(αl) dτ, where αl∊(0,1) for l=1,2,3
A C1 continuous trigonometric spline curve can be created. The above continuity and differentiability conditions show that there are eight constants in particular, namely ai,bi,ci,di,a(i+1),b(i+1),c(i+1),and d(i+1). The integral of the right side interval from a bigger value to a smaller value is shown by the negative sign in fractional order, which is μi in the given situation. Three (03) different values can be assigned to α=αl, somewhere in the range of 0 and 1, to get eight (08) conditions in order to get a unique answer for each constant.
At point,m μ=μ(i+1) through the use of the continuity and differentiable conditions in (3). We possess the subsequent trigonometric polynomial represented in equation format.
Aij Bi =Ci,i,j=0,…7 ,
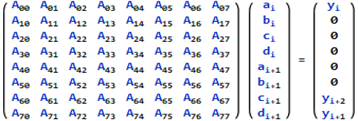
where Aij is a matrix of coefficients whose values are as follows:
A00=1, A01=0, A02=0, A03=0, A04=0, A05=0,A06=0, A07=0,
A11=1,A12=k coshi ,A13=-k sinkhi ,A14=0,A15= 1,A16=1,A17=0 A17=0,A20=1, A21=hi,A22=sinkhi , A23=coskhi ,A24=1,A25=0,A26=0, A27=1, A60=0,A61=0,A62=0,A63=0,A64=1,A65=h(i+1),A66=sinkh(i+1) ,A67=coskh(i+1) ,A70=0,A71=0,A72=0,A73=0,A74=1,A75=0,A76=0,A77=1.
To evaluate the remaining coefficient the following equations for j=3,4,5 and pj=α_(j-2) are used,
Aj0=0, Aj1=(-t+μ(i+1))2/(1-pj ),
Aj2=(-k cos(-1+pj )t-(-2+pj ) μi-μ(i+1))(-t+μ(i+1) )^(1-pj ))/((-2+pj)(-1+pj)),
Aj3=(k sink((-1+pj )t-(-2+pj ) μi-μ(i+1)) (-t+μ(i+1) )^(1-pj ))/(-2+pj )(-1+pj)
Aj4=0, Aj5=(s-μ(i+1))^(1-pj )/(1-pj ),
Aj6=-(k cosk(s-μ(i+1))^(1-pj) ((-1+pj )s-(-2+pj ) μi-μ(i+1) ))/(2-3pj+pj2 ),
Aj7=(k sink(s-μ(i+1))^(1-pj ) ((-1+pj )s-(-2+pj)μ-μ(i+1)))/(2-3pj+pj2 ).
The coefficient of vector Ci is as follows:
C0=yi,C1=0,C2=0,C3=0,C4=0, C5=0, C_6=y_(i+2,) C7=y(i+1).
A total of 8 equations and 8 unknown constants make up this set. Here, the shape parameters ‘s’ and ‘t’ from the above formula are used.
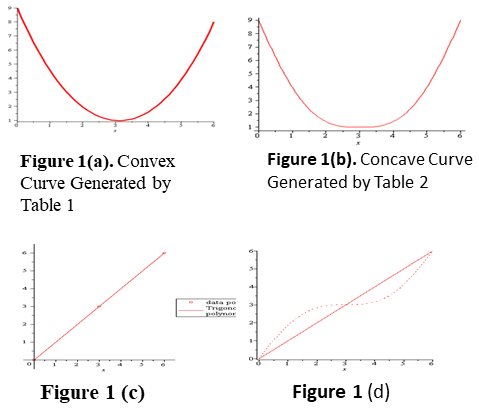
Table 1.Point in μy-plane
| μ |
0 |
3 |
6 |
|
Y |
1 |
9 |
1 |
Table 2.Points in the μy-plane
| μ |
0 |
3 |
6 |
|
Y |
9 |
1 |
9 |
Table 3. Points in the μy-plane
| μ |
0 |
3 |
6 |
|
Y |
0 |
3 |
6 |
Table 4. Derivatives of Fractional Order for α
| αl |
0.90 |
0.92 |
0.95 |
When employing the data points from Table 1 to construct a trigonometric polynomial, the curve exhibits convexity, as depicted in Fig. 1(a). Conversely, utilizing the data points from Table 2 to form a trigonometric spline results in a concave curve, as shown in Fig. 1(b). Figures 1(c) and 1(d) illustrate the outcomes when the values from Table 3 are utilized. The figures depict that trigonometric spline transforms into a straight line.
An example in Table 4 illustrates the fractional order trigonometric spline, utilizing both first derivative and fractional derivatives with values ranging between 0 and 1 for α.
3. VARIATION IN T-SPLINE AT DIFFERENT VALUES OF CONSTANT k
Different values of constant were assigned to trigonometric polynomials and Figures (2a-2d) show how varying the constant k influences the shape of the data points depicted in Fig. 1(a) as the following curves.
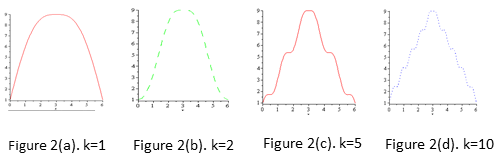
Figures (2a-2d) show the effect of constant k.
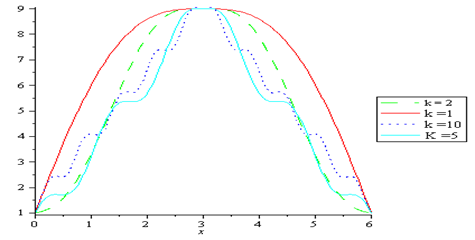
Figure 2. Comparison between Different Values of Constant in T-Spline
4. EFFECT OF CONTROL PARAMETERS s AND t ON T- SPLINE
The control parameters "s" and "t", presented in the equations (1) and (2), may affect the shape of the curve, which is very clear in Figs. (3a-3d). When "s" and "t" converge to μi and μ(i+2) respectively, then the curve shape begins to convert in convex curve.
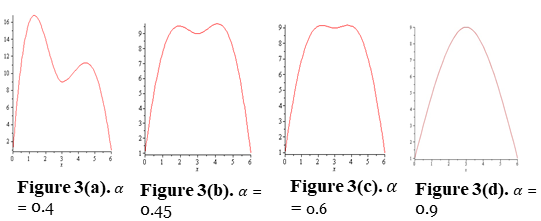
Figures (3a-3d) show the effect of fractional derivative of order “𝛼”. The fractional derivative order does not change the basic entity of the curve in any way. The impact of the final shape still passes through the same data point. Various values of factional derivative “α” have been assigned, as highlighted in Table 5. These fractional derivatives have a noticeable impact on the end shape of curve, as seen in Fig. 3.
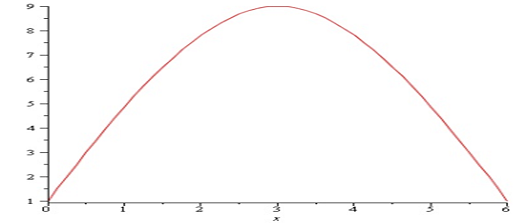
Figure 3. Fractional spline and classical spline coincide when 𝛼 = 0.95.
Table 5. Derivatives of Fractional Order for Various Values of α
|
Α |
.90 |
.92 |
.95 |
|
.70 |
.92 |
.95 |
|
|
.70 |
.80 |
.95 |
|
|
.50 |
.60 |
.70 |
|
|
.50 |
.55 |
.65 |
|
|
.40 |
.50 |
.60 |
5. QUADRATIC LAGRANGE AND CUBIC SPLINE COMPARISON WITH TRIGONOMETRIC SPLINE
Fig. 4(a) makes it clear that the methods used to find the cubic spline curve and the method described in this paper are equivalent. In both instances, the same data points from Table 1 have been used to obtain the outcome shown in figures 1 and 4(a).
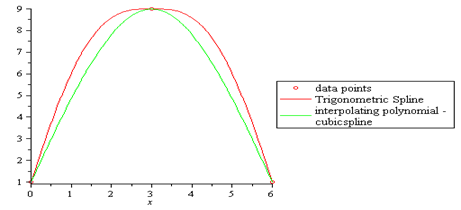
Figure 4(a). Comparison between Cubic Spline and Trigonometric Spline
In both situations, identical data points from Table 1 have been used to compare quadratic and trigonometric splines. The results are shown in figures 1 and 4(b).
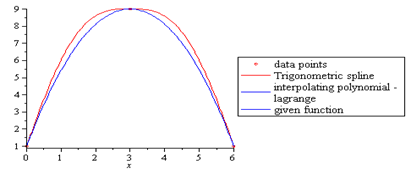
Figure 4(b). Comparison between Quadratic Langrage Polynomial and Trigonometric Spline
A formula for generating a sequence of fraction spline curves recursively for the points (μi, yi) , i= 0,1,2,⋯,n, where μ0<μ1<μ2… <μ_n, there is a defined algorithm in this section for three data points, namely μ0, μ(1) and μ(2)Additional curves can be created once the first two curves are generated Pi (μ) for i=2,3,…n-1 applying the previously elaborated conditions,
P(i+1) (μ(i+2))=P(i+2) (μ(i+2)),
P(i+2)(μ(i+3) )=y(i+3),
P(i+1),(μ(i+2) )=P(i+2),(μ(i+2)),
P(i+1)α (μ(i+2))=P(i+2)α(μ(i+2)) (4)
Since
Pi (μ)=ai+bi (μ-μi )+ci sink(μ-μi)+di cosk(μ-μi), for μ∈ [μi,μ(i+1)].
In this case, there are four (04) unknown constants and four (04) conditions (4). By using condition these equations come from
C1=a(i+2)+d(i+2),
y(i+3)=a(i+2)+b(i+2) h(i+2)+c(i+2) sinkh(i+2)+d(i+2) coskh(i+2),
C3=b(i+2)+kc(i+2),
C4=b(i+2) Aj5+c(i+2) Aj6+d(i+2) Aj7.
Using Gaussian Elimination method, for each subsequently occurring interval, the recursive relation is listed below.
a(i+2)=c4 g1-c4 h(i+2) k-Aj5 c3 g1-Aj6 y(i+3)+Aj6 h(i+2) c3+Aj5 ky(i+3)-c1 Aj7 g1+c1 Aj7 g1+c1 Aj7 h(i+2) k+c1 Aj6 g2-c1 Aj5 kg2/-Aj7 g1+Aj7 h(i+2) k+Aj6 g2-Aj6-Aj5 kg2+Aj5 k
b(i+2)=kc4-c4 g2 k+ky(i+3) Aj7-kc1 Aj7-Aj7 g1 c3+Aj6 c3 g2-c3 Aj6/-Aj7 g1+Aj7 h(i+2) k+Aj6 g2-Aj6-Aj5 kg2+Aj5 k
c(i+2)=-c4-g2 Aj5 c3-Aj7 c3 h(i+2)-g2 c4+Aj7 y(i+3)-Aj7 c1-c3 Aj5/-Aj7 g1+Aj7 h(i+2) k+Aj6 g2-Aj6-Aj5 kg2+Aj5 k
d(i+2)=-c4 g1-c4 h(i+2) k-Aj5 c3 g1-Aj6 y(i+3)+Aj6 c1+Aj6 h(i+2) c3+Aj5 ky(i+3)-c1 Aj5 k/-Aj7 g1+Aj7 h(i+2) k+Aj6 g2-Aj6-Aj5 kg2+Aj5 k
Where g1=sinkh(i+2) , g2=coskh(i+2) .
For a specific value of j, this represents the previously determined fractional order derivative. A specified collection of data points is examined according to the intended approach and the outcomes are shown in Fig. 5(a) and Fig. 5(b).
Table 6. Set of Convex and Concave Data Points
| μi |
0 |
3 |
6 |
9 |
12 |
15 |
| yi |
0 |
9 |
1 |
3 |
9 |
0 |
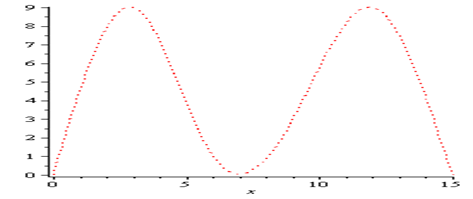
Figure 5(a). Fractional Convexity Concavity in Points Form
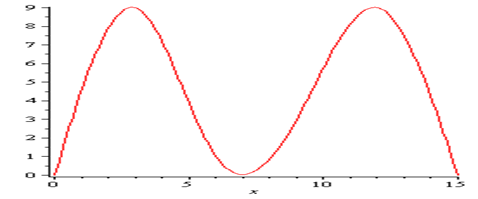
Figure 5(b). Fractional Convexity and Concavity in Curve Form
6. STRENGTHS AND LIMITATIONS
The benefit of this method is that the interpolating curve may be computed locally, making it possible to locally modify the spline curve without changing the control points. In this study, fractional derivatives have been used to control and manipulate the curve without shuffling the data points. Different values have been assigned to the factional derivative α, as given in Table 4. Fig. 4 shows the effect of these fractional derivatives on the shape of the curve. Table 5 illustrates how the fractional order α controls the path of piecewise curves. The aforementioned information shows that when 0.7 < α < 1, both ordinary cubic spline and fractional order cubic spline follow almost the same path. When α < 0.7, the fractional cubic spline strays from the original path. Due to this reason, the result is a better control on the curve and the path can be modified as needed.
7. CONCLUSION
All the necessary qualities are satisfied by the trigonometric spline introduced in this study. Shape parameters enable visual smoothness to be adjusted without altering the control points. Trigonometric basis functions give these curves the ability to construct convex, concave, horizontal straight lines, and other geometric shapes, which gives them enormous importance. The trigonometric spline shown in this study is able to retain the characteristics of the actual data and provides a more accurate depiction in addition to generating a very flexible and pleasing curve.
In this study, trigonometric spline has been created to address the problem with several shape-preserving techniques. Each subinterval of the produced spline contains four (04) free parameters. Two (02) of these parameters have built-in constraints to maintain the positive shape of the data, while the other two are open to shape adjustment. Additionally, the error of produced polynomial interpolation is observed. trigonometric function with four (04) shape parameters has been developed to maintain positivity and warrant smoothness.
Conflict of Interest
The author of the manuscript has no financial or non-financial conflict of interest in the subject matter or materials discussed in this manuscript.
Data Availability Statement
The data associated with this study will be provided by the corresponding author upon reasonable request.
Bibliography
[1] Barsky BA. A description and evaluation of various 3D models. In:Kunii TL, eds. Computer Graphics: Theory and Applications. Springer; 1983:75–95.
[2] Hussain MZ, Sarfraz M, Shaikh TS. Shape preserving rational cubic spline for positive and convex data.Egypt Inform J. 2011;12(3):231–236. https://doi.org/10.1016/j.eij.2011.10.002
[3] Ibraheem F, Hussain M, Hussain MZ, Bhatti AA. Positive data visualization using trigonometric function.J Appl Math. 2012;2012:e247120. https://doi.org/10.1155/2012/247120
[4] Zhu Y, Han X, Han J. Quartic trigonometric Bézier curves and shape preserving interpolation curves.J Comput Inform Syst. (2012);8(2):905–914.
[5] Liu S, Chen Z, Zhu Y. Rational quadratic trigonometric interpolation spline for data visualization.Math Prob Eng.2015;2015:e983120. https://doi.org/10.1155/2015/983120
[6] Ahlberg JH, Nilson EN, Walsh JL. The Theory of Splines and Their Applications. Vol 38. Elsevier; 2016.
[7] Sarfraz M, Samreen S, Hussain MZ. Modeling of 2D objects with weighted-quadratic trigonometric spline. Paper presented at: 13th International Conference on Computer Graphics, Imaging and Visualization; March 29–April 1, 2016; IEEE. https://doi.org/10.1109/CGiV.2016.15
[8] Bagley RL, Torvik PJ. Fractional calculus in the transient analysis of viscoelastically damped structures. AIAA J. 1985;23(6):918–925. https://doi.org/10.2514/3.9007
[9] Baillie RT. Long memory processes and fractional integration in econometrics. J Econom. 1996;73(1):5–59. https://doi.org/10.1016/0304-4076(95)01732-1
[10] Talib I, Belgacem FBM, Asif NA, Khalil H. On mixed derivatives type high dimensions multi-term fractional partial differential equations approximate solutions. AIP Conf. Proc. 2017;1798(1):e020024. https://doi.org/10.1063/1.4972616
[11] Kirmani S, Mariyam S, Asif NA. Fractional order C¹ cubic spline.Int J Adv Soft Comput Appl. 2018;10(3):180–189.
[12] Singh H, Kumar D, Baleanu D.Methods of Mathematical Modelling: Fractional Differential Equations. CRC Press; 2019.
[13] Kirmani S, Suaib NM, Riaz MB. Shape preserving fractional order KNR C1 cubic spline.Eur Phy J Plus. 2019;134(7):e319. https://doi.org/10.1140/epjp/i2019-12704-1
[14] Kirmani SK, Riaz MB, Jarad F, Jasim HN, Enver A. Shape preserving piecewise KNR fractional order Biquadratic C2 Spline.J Math. 2021;2021:e9981153. https://doi.org/10.1155/2021/9981153
[15] Samreen S, Sarfraz M, Jabeen N, Althobaiti S, Mohamed A. A rational quadratic trigonometric spline (RQTS) as a superior surrogate to rational cubic spline (RCS) with the purpose of designing.Appl Sci. 2022;12(8):e3992. https://doi.org/10.3390/app12083992
[16] Samreen S, Sarfraz M, Mohamed A. A quadratic trigonometric B-Spline as an alternate to cubic B-spline.Alex Eng J. 2022;61(12):11433–11443. https://doi.org/10.1016/j.aej.2022.05.006